
Por Agrim. Ramón Oniel Jimenez Rodríguez, ASD. 261
Hace 4000 años, en Egipto, se inventó el primer reloj y fue, el reloj de sol. Con el paso del tiempo se crearon otros, como lo fueron el reloj de agua y el de arena. Así, a lo largo de la historia se fueron encontrando y descubriendo nuevas formas de hacer que este invento evolucionara.
El tiempo, tanto en clima como en horarios, es fundamental para el desempeño de los levantamientos geodésicos y topográficos bajo la modalidad GNSS.
La sincronización del tiempo es básico para la aplicación GNSS, en todas sus vertientes. Llámese desde escáner láser, estaciones robóticas y drones.
Un ejemplo práctico de la administración del tiempo en horas es la configuración de los vuelos aéreos. Esa arquitectura de planificación es lo que hace del mundo de la aviación un concepto único y preciso.
La medición precisa del tiempo en el mundo moderno es crucial para numerosas actividades humanas: coordinar redes de comunicación globales, sincronizar procesos tecnológicos complejos, garantizar la precisión de los datos en las transacciones financieras, respaldar una amplia gama de esfuerzos científicos y hacer posibles sistemas de navegación y posicionamiento precisos. Los receptores de posicionamiento, que se utilizan principalmente para localizar y rastrear objetos, personas o animales, dependen de la sincronización horaria precisa del GNSS para funcionar correctamente.
La medición precisa del tiempo, esencial para el correcto funcionamiento de los receptores de posicionamiento, no habría sido posible sin el desarrollo de tres conceptos temporales clave a lo largo de los últimos 150 años:estandarización, sincronización y optimización del tiempo.
La estandarización global del tiempo sentó las bases para una comunicación consistente y sincronizada, una cooperación internacional fluida y una coordinación precisa de actividades en diversos sectores y regiones.
Este proceso comenzó en el siglo XIX, cuando los sistemas ferroviarios europeos y estadounidenses requerían una coordinación horaria precisa. Debido a que los trenes cubrían grandes distancias, podían surgir diferencias horarias significativas, por ejemplo, entre las costas este y oeste de Estados Unidos.
La sincronización global del tiempo comenzó en la década de 1940 y tiene una enorme relevancia para una amplia gama de tecnologías e industrias: desde la navegación y las telecomunicaciones hasta las finanzas y las redes eléctricas.

En cierta medida, la estandarización horaria global tiene sus raíces en la coordinación de las llegadas y salidas de trenes en sistemas locales. Antes de la era de la industrialización y la llegada de los sistemas ferroviarios, las horas locales presentaban solo inconvenientes menores. Los viajeros, como los que viajaban de Londres a Manchester en autobús, simplemente ajustaban sus relojes al llegar.
Esto cambió significativamente a medida que la red ferroviaria se expandió y exigió una mayor organización. Coordinar el tráfico ferroviario entre pueblos y ciudades sin estandarización horaria planteó un desafío logístico considerable. En consecuencia, países como Francia y el Reino Unido adoptaron la estandarización horaria después de la Conferencia Internacional del Meridiano (1884).
Un siglo después, los avances globales en la industria, las finanzas, la ciencia y la tecnología generaron una demanda de precisión que superaba lo que podían ofrecer los relojes convencionales. Para seguir el ritmo de este progreso, estos sectores necesitaban algo más que un tiempo estandarizado y la precisión relativa de los relojes de cuarzo. A medida que los ingenieros superaron los desafíos técnicos, surgió un método más sofisticado de medir el tiempo.
Con el paso de los años, la sincronización horaria se ha convertido en un elemento esencial de los avances tecnológicos globales. La medición precisa del tiempo debía ser el primer paso. En 1968, el Instituto Nacional de Normas y Tecnología (NIST) introdujo una medición más precisa del segundo, y los relojes atómicos desempeñaron un papel fundamental en este logro.
El concepto de medir el tiempo basado en la frecuencia de una onda electromagnética se originó en la década de 1870. James Clerk Maxwell fue el primero en sugerir que la medición del tiempo podía determinarse a través del tiempo periódico de vibración de un tipo específico de luz, siendo su longitud de onda la unidad de longitud.
Más tarde, en la década de 1910, Niels Bohr propuso que los electrones tienen estados de energía cuantizados. Estas dos ideas forman las bases del funcionamiento de un reloj atómico.
Las aportaciones teóricas de Maxwell y Bohr se materializaron años después, cuando Isidor Rabi intentó por primera vez construir un reloj atómico. En la década de 1940, Harold Lyons y su equipo hicieron nuevos avances en el desarrollo de un dispositivo de este tipo. Pero no fue hasta la década siguiente cuando Louis Essen creó el primer reloj atómico (1955).
Doce años después, un segundo se definió como la duración de 9.192.631.770 oscilaciones de un átomo de cesio. Con esta tecnología en marcha, las aplicaciones terrestres fueron el primer objetivo, pero pronto surgió como aplicación la sincronización del tiempo de los satélites, crucial para las aplicaciones de posicionamiento.
Una combinación de avances científicos y tecnológicos en la tecnología espacial y satelital influyó en la idea de utilizar una sincronización horaria precisa para el posicionamiento y la navegación global. Si bien no se puede señalar a una sola persona como el único creador de este concepto, el Laboratorio de Investigación Naval de los Estados Unidos (NRL) desempeñó un papel importante en la exploración del uso de relojes atómicos para el cronometraje preciso en satélites.
Si bien el satélite inicial del programa TIMATION no incorporaba un reloj atómico, el programa sentó las bases para el desarrollo del Sistema de Posicionamiento Global (GPS). Tras la fusión del programa TIMATION con el programa 621B de la Fuerza Aérea, el posterior programa GPS NAVSTAR incluyó satélites equipados con los primeros relojes atómicos.

El programa GPS NAVSTAR lanzó el Satélite de Tecnología de Navegación 1 (NTS-1) en 1974. Esto marcó el debut de los satélites equipados con un reloj atómico para probar el posicionamiento global a través de una sincronización horaria precisa.
La misión demostró que los relojes atómicos en órbita, específicamente el reloj atómico estándar de frecuencia de rubidio utilizado, podían lograr un cronometraje sumamente preciso y un posicionamiento preciso de la Tierra.
El éxito del lanzamiento del NTS-1 contribuyó significativamente al establecimiento de la red GPS. El NTS-1 fue el precursor del GPS, que se basa en relojes atómicos para proporcionar la hora exacta y, por lo tanto, información de posición. En la actualidad, los satélites GNSS utilizan tres tipos de relojes atómicos: células de vapor de rubidio, haces atómicos de cesio y máseres de hidrógeno.
Si bien los relojes atómicos son sumamente precisos, no son cronometradores infalibles. La medición del tiempo mediante relojes atómicos satelitales es susceptible a imperfecciones del reloj, variaciones de temperatura, características del oscilador, envejecimiento, efectos relativistas y retrasos atmosféricos.
Los satélites de posicionamiento orbitan a una altitud de aproximadamente 20.200 km sobre la Tierra. A esta altura, las fuerzas gravitacionales difieren ligeramente de las que se experimentan en la superficie terrestre.
Esta variación de la gravedad afecta el paso del tiempo de los satélites en relación con los observadores terrestres, lo que hace que el tiempo transcurra más rápido para ellos. La dilatación relativista del tiempo que experimentan los satélites tiene implicaciones prácticas para la medición del tiempo. Como los satélites están en constante movimiento, experimentan fuerzas gravitacionales variables de la Tierra, lo que aumenta la complejidad del cronometraje.

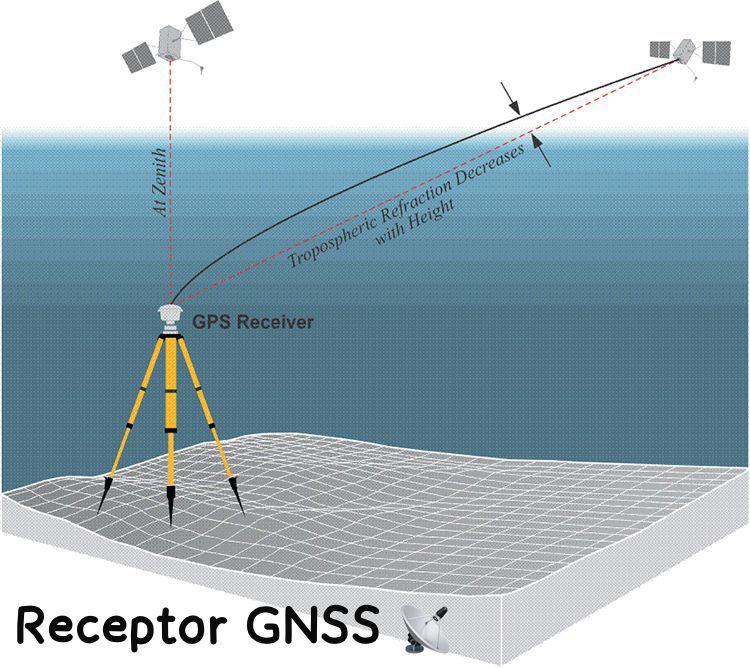
Los retrasos atmosféricos son otra fuente de error a la hora de medir el tiempo con precisión. En un mundo sin atmósfera, calcular el tiempo que tarda una señal en viajar desde un satélite hasta un receptor GNSS sería pan comido. Lamentablemente, la ionosfera influye en la propagación de la señal de radio alterando su trayectoria, lo que da lugar a imprecisiones en la estimación del tiempo.
Debido a estos errores, el cronometraje de los relojes atómicos satelitales necesita una comparación constante con los relojes de referencia en la Tierra.
He aquí la importancia de conocer el funcionamiento de los relojes en los satélites y los equipos GNSS, saber el impacto de la atmósfera y su consecuencia. Para determinar la ubicación de una persona o un objeto en la Tierra mediante tecnología satelital, se necesitan al menos cuatro satélites que comuniquen sus posiciones y horas a un receptor de posicionamiento. No se puede lograr un posicionamiento preciso si las lecturas de tiempo difieren.
La sincronización de la información horaria entre satélites es fundamental para calcular datos de posicionamiento precisos. Esta sincronización se controla y ajusta continuamente mediante estaciones de control GNSS terrestres.
Además de observar y recopilar continuamente datos sobre las señales transmitidas por los satélites, las estaciones de vigilancia terrestres también miden datos atmosféricos, como los retrasos ionosféricos y troposféricos, que afectan principalmente a la precisión de las señales GNSS. Los datos recopilados se procesan a continuación para identificar errores y variaciones en las señales GNSS.
Las estaciones de monitoreo GNSS son fundamentales para mejorar la precisión de las posiciones calculadas al proporcionar correcciones a los receptores GNSS. Este proceso garantiza la sincronización y depende de la precisión del cronometraje mediante relojes atómicos y servidores de tiempo GNSS.
El desarrollo de las estaciones de monitoreo GNSS es paralelo a la historia y expansión de los sistemas de navegación por satélite. La primera estación de monitoreo por satélite se estableció en el Laboratorio de Física Aplicada (APL) de la Universidad Johns Hopkins en la década de 1950. Esta estación jugó un papel crucial en el desarrollo del sistema Transit, el primer sistema de navegación por satélite operativo del mundo, que allanó el camino para el desarrollo de sistemas de navegación por satélite civiles como el GPS.
Las estaciones de monitoreo GNSS son solo una parte de un segmento terrestre más amplio. Este segmento, crucial para las constelaciones de satélites GNSS, comprende diversas instalaciones como centros de control, segmentos, antenas y estaciones de monitoreo. En los últimos 70 años, el segmento terrestre GNSS ha evolucionado, pero una de sus tareas principales ha persistido: garantizar la integridad de la señal de sincronización.
Hay que aclarar que las estaciones de control o vigilancia terrestre GNSS o Satélite, no son las conocidas como estaciones permanentes CORS, el término GNSS, es el que dar a interpretar el término. Por lo que son dos conceptos muy diferentes.
Para determinar con precisión el posicionamiento de un objeto en la Tierra se necesita algo más que información espacial. La asignación de diferentes zonas horarias en todo el mundo, la medición precisa de la unidad fundamental del tiempo y la instalación de relojes atómicos en satélites fueron factores esenciales en el desarrollo de la medición actual del tiempo mediante GNSS, lo que, a su vez, permitió la precisión de los receptores de posicionamiento.
Dicho esto, incluso los relojes atómicos más precisos pueden experimentar desviaciones. Las discrepancias o desviaciones en los relojes satelitales y las condiciones atmosféricas introducen errores que alteran los cálculos de posicionamiento, lo que afecta la precisión del sistema. Dado que las diferencias en el tiempo transcurrido afectan en última instancia las mediciones de posicionamiento, deben corregirse garantizando la precisión del cronometraje en la Tierra.
En conclusión, es bien sabido que los relojes de los receptores GNSS se desvían con respecto a la escala de tiempo atómico estable que, en última instancia, define un sistema GNSS particular. Sin embargo, los fabricantes de receptores GNSS intentan limitar la magnitud de la diferencia de tiempo dentro de un rango predefinido.
En general, debido a que los receptores GNSS limitan el desfase a límites bastante estrictos (normalmente un milisegundo o menos), el efecto correspondiente en la posición calculada suele ser insignificante para todas las aplicaciones, salvo las más exigentes.
Sin embargo, hay una última cuestión que debe tenerse en cuenta: la estimación del desfase del reloj del receptor. Si el receptor utiliza un filtro Kalman para el procesamiento de datos, lo que suele suceder, se debe tener cuidado de detectar y tener en cuenta correctamente los saltos de milisegundos antes de incorporar las mediciones al filtro.
Sin este proceso de filtrado de datos, el filtro verá efectivamente un error de alrededor de 300 kilómetros (un milisegundo) o más en todas las mediciones; sin embargo, debido a que el desfase del reloj suele estar bastante bien limitado (incluso para un oscilador de bajo rendimiento), los errores de medición de distancia terminarán en la posición calculada e introducirán un error de posición muy grande (si la solución es estable).
¡¡¡Feliz y bendecido inicio de semana, éxitos!!!
Debemos tener en cuenta que todas nuestras proposiciones que involucran el tiempo son siempre proposiciones sobre eventos simultáneos». Albert Einstein, Sobre la electrodinámica de los cuerpos en movimiento, 1905.